
💡
차량의 wheel alignments을 위한 camber angle 검사(MCU 기반3축 가속도 센서)
- MCU = micro-control unit
wheel alignment의 중요성
- Camber angle
- 조향 제어와 안정성에 영향
- Toe angle
- 연료 효율성, tire lifespan, driving comfort에 영향을 줌.
접근 방법
- MCU기반 접근방식은 3축 가속도 센서를 이용해 중력값을 획득하고, camber 검사 시스템와 차량간의 좌표변환을 적용시킴
- 캠버 시스템의 오정렬 각도를 자체적으로 보상할 수 있으므로, X축과 Z의 캠버축 완벽한 각도 조절이 필요하지 않음.
- 본 논문에서의 데카르트 좌표 C의 구성요소를 다음과 같이 표현함
- 이 논문에서 C는 차량, 바퀴, 가속도계 또는 캠버 검사 시스템이 될 수 있음.
차량과 캠버 검사 시스템의 좌표 변환
- 캠버 검사 시스템은 좌표 S의 캠버 검사 시스템에서 로컬 중력(1g = 9.8m/s2와 같지는 않음)를 감지 할 수 있지만, 로컬중력은 차량좌표 V의 아래쪽에만 있음.
- 좌표 V와 S사이의 좌표 변환은 로컬 중력이 좌표 V와 S에 따라 다른 표현을 가진 동일한 벡터임
- 캠버측정을 위한 계산을 용이하게 함.
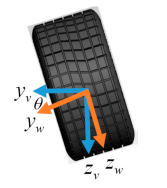
- 그림 2는 좌표 V를 보여줌
- 좌표V의 x, y, z축은 각각 전방, 우측, 하향으로 정의됨.
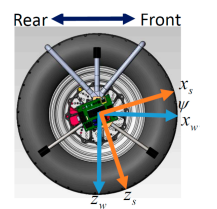
front view of the vehicle and wheel coordinates with the pitch (camber) angle
- 시스템 주축과 정렬된 좌표 S의 x,y, z.
⇒ 좌표 S을 이용해 캠버각도 측정
right side view of the front-right wheel and the camber inspection system with yaw angles.
- pitch각도와 yaw각도를 포함하여 좌표 V와 S사이의 오일러 각은 좌표 변환에 필요함.
- camber각도는 분명히 pitch 각도
- yaw 각도
- pitch 각도 : 좌표 V의 X축이 회전
- yaw 각도 : 좌표 Y축으로 회전
- 직관적으로 V, W, S의 원점은 동일.
- camber각도는 분명히 pitch 각도
- 중력과 같은 물체는 다른 좌표에 있을 수 있음.
or
- 정의에 따르면 그림 2의 좌표는 좌표 V와 W에 의해 변환됨 (1)
- 비슷하게 그림3에서의 정의는 좌표 W와 S사이에서 좌표 변환이 일어남. (2)
- 식 2에서 1을 빼면 좌표 V에서 S로의 좌표변환은 다음과 같음 (3)
캠버 각도 검사와 오류 분석
- 로컬 중력은 가속도계의 가속도에 의해 감지 될뿐임
- 캠버 각도 측정 중 차량이 수평 플랫폼에서 안정적일 때 좌표 V의 z축에 따라서 있음,
(즉
- 가속도계는 가속도
- 여기서 ax, ay, az는 각각 좌표 S의 x, y, z 성분의 가속도
- 식 3의
- 그리고 (5)
- 식 4를 5에 대입하면 다음과 같이 됨
- 제안된 접근방식에서 캠버각도 측정은 좌표 S와 좌표 W 사이의 misaligned 각도
- 또한 misaligned 된 각도는 식 (4)로부터 평가할 수 있음
- 바퀴의 캠버각도
- 식 (6)에서 좌표 S와 W의 X축이 완전히 같은 방향으로 정렬되어 있는지의 여부를 직업 판단할 수 있음.
캠버 검사 시스템과 가속도계 사이의 오정렬된 축에 대한 보정
- 캠버 검사 시스템과 가속도계사이의 오정렬된 축은 보통 MCU기반 캠버 검사 시스템에 관해서 발생함
- 오정렬은 캠버 각도 검사의 정밀도를 악화시킴
- 오정렬에 대한 교정은 필수적임!
- k는 x, y, z일 수 있으며, 시스템의 k축 보정에 대한 인덱스임
- i는 1~N까지의 범위를 가지면서 i번째 set data의 인덱스임
- N은 측정데이터의 총 수
- 성능지수 (7)
- 평균 중력 제약조건 (8)
- 식 7, 8은 제약조건이 있는 최적화 문제. 라그랑주(Lagrange) 함수는 다음과 같음.(9)
- 10~12번을 8번식에 대입한 경우 (13)
- 13번 식에 따라 (14), (15), (16)
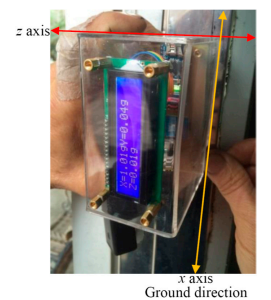
- 예를 들어 캠버 검사 시스템의 x축 보정 시 그림4와 같이 시스템이 수직면에 기대어 있는 동안 x축은 수직으로 지면을 향함. 가속도계에서 3축 가속도 측정 데이터를 순차적으로 수집할 수 있음. (17)
- A는
- 시스템의 z축 조정은 다음과 같은 순서로 진행됨 (18)
- vertical 평면에서의 x축과 z축은 캠버 검사 시스템의 back plane을 위해 조정 될 수 있음.
- x축과 ,z축이 충족되면, 17번 식과 18번 식으로부터 내적연산 결과(
- 여기서 (
- 그 후 (19)
- A는
- 즉, 캠버 검사 시스템의 해당 가속도로 변환될 수 있는
- 따라서 정밀한 보정을 통해 시스템과 가속도계 축의 misaligned를 제거할 수 있음.
- 또한 캠버각은 식 19로 변환된 가속도계 좌표에 의한 원시 측정 데이터로 식 6으로부터 측정될 수 있음.
- 예를 들어 캠버 검사 시스템의 x축 보정 시 그림4와 같이 시스템이 수직면에 기대어 있는 동안 x축은 수직으로 지면을 향함. 가속도계에서 3축 가속도 측정 데이터를 순차적으로 수집할 수 있음. (17)
에러분석 측정
- 식 (6)에서 캠버각도
- 캠버 검사 시스템에서 감지된 가속도는 로컬 중력(1g)과 같음.
- 식 (20)은 다음과 같이 변환됨 (21)
- (21)식에서 오른쪽 식의 부호가 모두 +인 악조건에서 방정식 (21)은 다음과 같이 표현함 (22)
- 식(22)는 camber측정의 오류가 모든 가속도 축의 간격에 높게 의존함을 설명함.
- 식(22)의 악조건에서의 최소 측정 에러는
- 일반적으로 가속도계의 3축 간격은 동일하지 않음
- 식 (23)은 측정 오류를 줄이기 위해 가속도계의 최선의 간격 축이 좌표 S의 y축에 가깝게 정렬되어야함을 의미하는것으로 해석 가능함.
- 식 (22)의 측정오차는 캠버 각도 및 오정렬 또는 좌표 V에 대한 좌표의 attitude에 따라 달라짐.
- 식 (22)를 기반으로 그림 5는 가속도 측정의 악조건 상태인
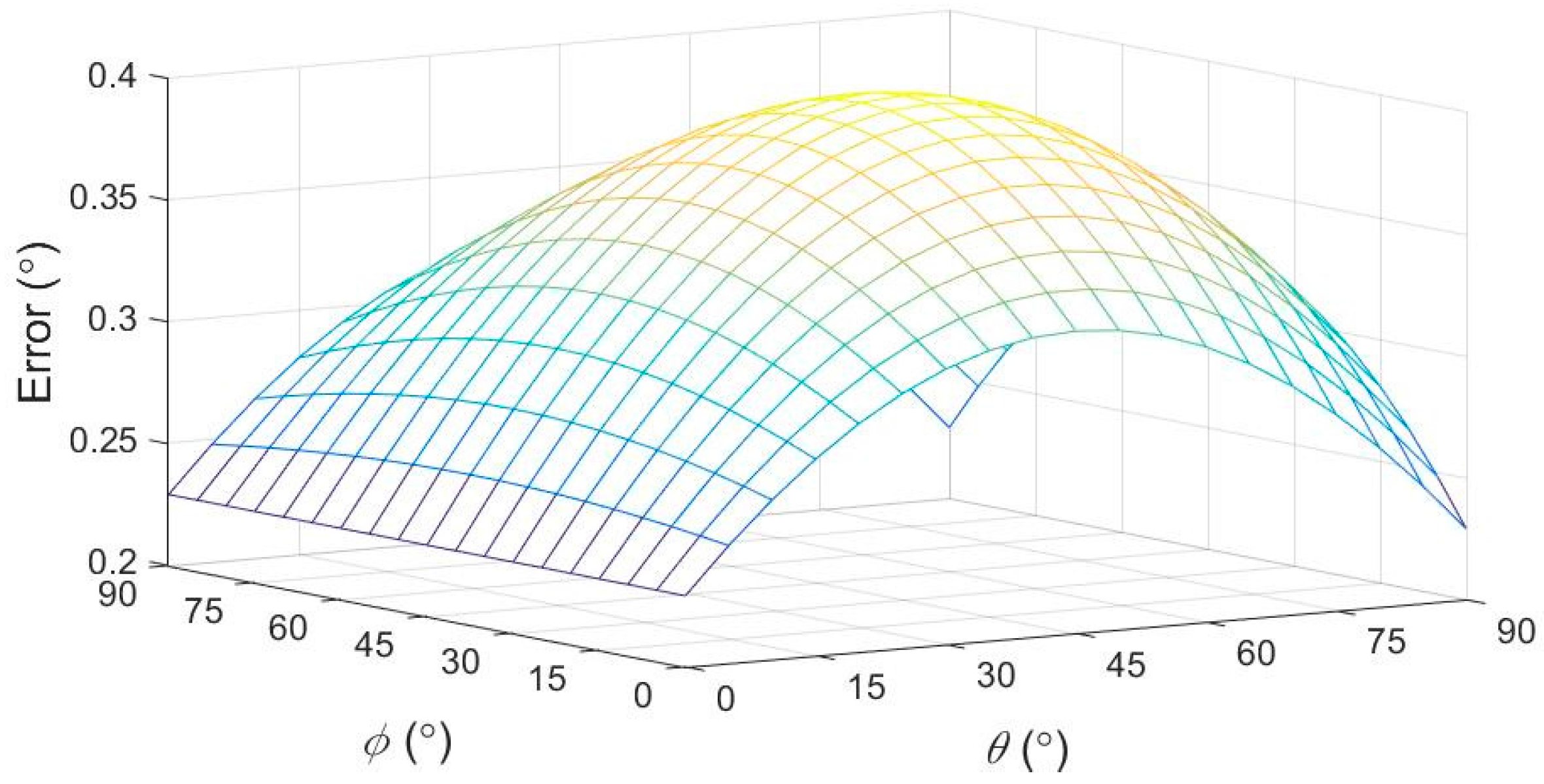
- 방정식 (23)에서
- 캠버각도는
- 식 (22)를 기반으로 그림 5는 가속도 측정의 악조건 상태인
