
💡
마찰계수 추정 시, 가속도센서 데이터 공압 트레일 변수를 입력으로, tire forces and pneumatic trail을 출력(Fy, Fz, t)으로 하고 layer 모델을 이용하여 예측
Abstract
- 마찰 추정 방법
- 공압 트레일의 높은 감도와 선형 영역에서의 마찰 계수에 대한 거의 선형 관계를 활용
- 피봇 정도를 나타내는 지표를 공압 트레일 정보를 사용하여 제안하고, 이는 흥분 상태가 마찰 계수 추정에 충분한지 여부를 결정하는 데 사용
- 마찰 계수
- 정규화된 측방력의 비율과 피봇 정도의 비선형 적응으로 추정
- 타이어 힘과 공압 트레일
- 신경망을 통해 추정
Introduction
- 기존 마찰 추정 방법
- 효과기반
- 타이어에 가해지는 자극, 슬립각도와 같은 기저관계를 통해 마찰계수 추정
- 차량 동적모델을 통해 탑재된 센서에 의해 추정됨
- 지능형 타이어 시스템에 의해 예측될 수 있음
- 마찰계수가 매개변수로 포함된 특정 모델에 적합시킴
- curve fitting models은 empirical friction-excitation models임.
- 간단한 타이어 모델
- 타이어가 비선형 영역이거나미끄러지는 영역에서 작동할 수 있는 충분한 자극 하에어 일정 수의 추정치를 필요로 함.
→ 타이어와 차량이 핸들링 한계끝까지 집입할때만 마찰계수를 주정 가능
→ 차량의 안전성과 주행 편안함을 저하시킴
- 옆쪽 마찰 계수 추정 분야
- 정렬모멘트(aligning memonet)와 공압 트레일을 기반으로 한 방법이 힘을 기반으로 한 방법들보다 우수함.
- 정렬모멘트는 측방력보다 일찍 포화됨
- 공압 트레일은 타이어가 선형 영역에서 작동할때라고 마찰계수의 변화에 민감함
- 슬립각도가 증가함에 따라 공압 트레일은 초기값에서 0으로 선형적으로 감소
- 측방 자극수준을 특징화 하는 적합한 지표로 사용 가능
- 공압 트레일 + 슬립각도 → 마찰계수(재귀최소 알고리즘을 이용한 모델)
- Han, K., Lee, E., and Choi, S., “Early Detection of Tire-Road Friction Coefficient Based on Pneumatic Trail Stiffness.” In 2016 American Control Conference (ACC) (Boston, MA, USA: IEEE, 2016), 6326-31, doi:10.1109/ACC.2016.752666 4.
- 브러시 모델을 통해 추정된 지능형 타이어 시스템에 의해 추정된 측방력과 정렬 모멘트로부터 마찰계수 추정
- Zou, Z., Zhang, X., Zou, Y., and Lenzo, B., “Tire-Road Friction Coefficient Estimation Method Design for Intelligent Tires Equipped with Three-Axis Accelerometer,” SAE Int. J. Veh. Dyn., Stab., and NVH 5, no. 3 (2021): 249- 258, https://doi.org/10.4271/10-05-03-0017.
- 정렬모멘트(aligning memonet)와 공압 트레일을 기반으로 한 방법이 힘을 기반으로 한 방법들보다 우수함.
- 타이어에 가해지는 자극, 슬립각도와 같은 기저관계를 통해 마찰계수 추정
- 원인기반
- 도로의 마찰특성의 근본적인 원인을 찾아내는 방식으로 작동
ex) 도로의 질감, 비, 눈으로 덮혀 있는지 여부
- 카메라와 3d레이저 스캐너를 사용하여 도로 특징 캡쳐
- 컴퓨터 비전, 기계학습, 물리모델링 접근법을 사용하여 기본 마찰계수가 할당된 일반적인 유형으로 분류
- 타이어 프로필의 미세진동 특정을 이용
- 지능형 타이어 시스템으로 캡처
- 주파수 영역 특성인 전력 스펙트럼 밀도와 같은 지표가 다른 마찰조건을 나타나는데 사용
- 대부분 도로 유형의 분류 제한
- 타이어에 자극을 요구하지 않음
- 효과기반 추정알고리즘의 전방향 정보로 사용
- 수렴시간을 단축하는데 도움이 됨
- 도로의 마찰특성의 근본적인 원인을 찾아내는 방식으로 작동
- 효과기반
- 논문에서 사용한 방법
- 마찰조건의 변화에 민감한 공압 트레일의 가치있는 특성을 활용
- 최소 자극하에서 타이어-도로 마찰 한계의 조기 탐지 실현
- 실험설정
- 지능형 타이어 시스템과 실험조건 소개
- 마찰조건의 변화에 민감한 공압 트레일의 가치있는 특성을 활용
실험 설정
- 타이어 트레드 내부 라이너에 장착된 삼축가속도계를 기반으로 개발
- 수집하는 데이터
- 힘, 모멘트, 슬립각, 팽창 압력 및 속도, 3개의 수직 힘(가속도계), 두개의 속도, 슬립 각(-6도 ~ 6도), 팽창압력 등
타이어 힘과 공압 트레일 추정
- 타이어의 측방력(lateral force), 수직력(vertical force), 그리고 공압 트레일(pneumatic trail)을 기계 학습 방법을 통해 추정
- 추정치는 이후의 마찰 계수 추정 알고리즘의 입력으로 사용
- 추정 접근법은 신경망을 기반으로 개발
데이터 수집 및 전처리
- x, y, z 방향의 가속도 신호
- 로우패스 필터를 통해 필터링
- 절단 주파수는 400Hz로 설정
- 접촉 패치
- 전방 가장자리와 후방 가장자리는 종방향 가속도의 두 개의 피크로 식별
- 35도에서 35도 사이의 가속도 신호를 취함
- 신호를 2.5도 간격으로 다운샘플링
- 타이어 회전마다 각 방향에 28개의 점이 신경망에 입력됨
- 공압 트레일
- 간접적인 방법
- 측정된 정렬 모멘트 Mz와 측정된 측방력 Fy를 사용하여 계산
-
- 측정된 횡력과 정렬 모멘트
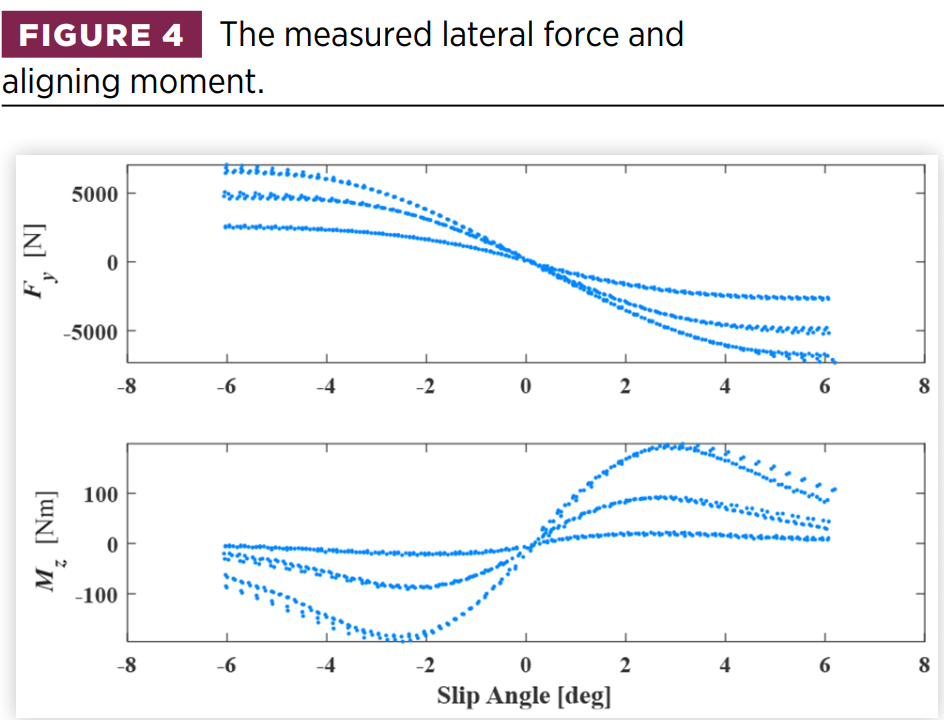
- 측정의 분할 및 불확실성으로 인해 작은 슬립 각에서 계산된 공압 트레일 값은 신뢰할 수 없음
- 이 값들은 크게 편동하며 일부 계산 값은 이론적 경계를 초과
- 이 식을 이용할 경우, 측정의 불확실성으로 인해 측정된 측방력과 정렬 모멘트 값으로 인해 공압 트레일 값을 계산 할 수 없음
- 그러므로 UniTire 모델을 사용하여 공압 트레일 모델을 적합
- 작은 슬립 각에서의 공압 트레일을 예측하여 이상치를 대체
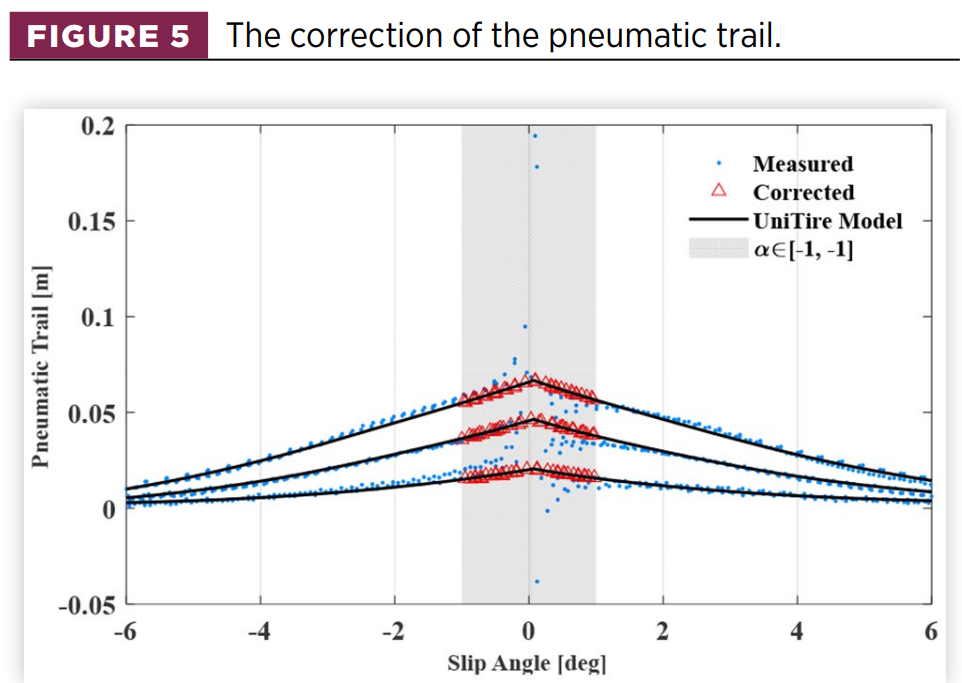
- 1도부터 1도까지의 범위에서 UniTire 모델 (검은 선으로 표시)과 예측된 공압 트레일 (빨간색 삼각형으로 표시)이 제시
- UniTire 모델은 공압트레일의 변동을 정확하게 표현할 수 있으며, 수정된 값들은 합리적
- 이후 섹션에서는 절댓값이 1도보다 큰 슬립 각에서의 초기 공압 트레일과 수정된 공압 트레일을 '측정된' 값으로 참조
- 측정의 분할 및 불확실성으로 인해 작은 슬립 각에서 계산된 공압 트레일 값은 신뢰할 수 없음
- 측정된 횡력과 정렬 모멘트
Estimation Scheme and the Results
- 신경망
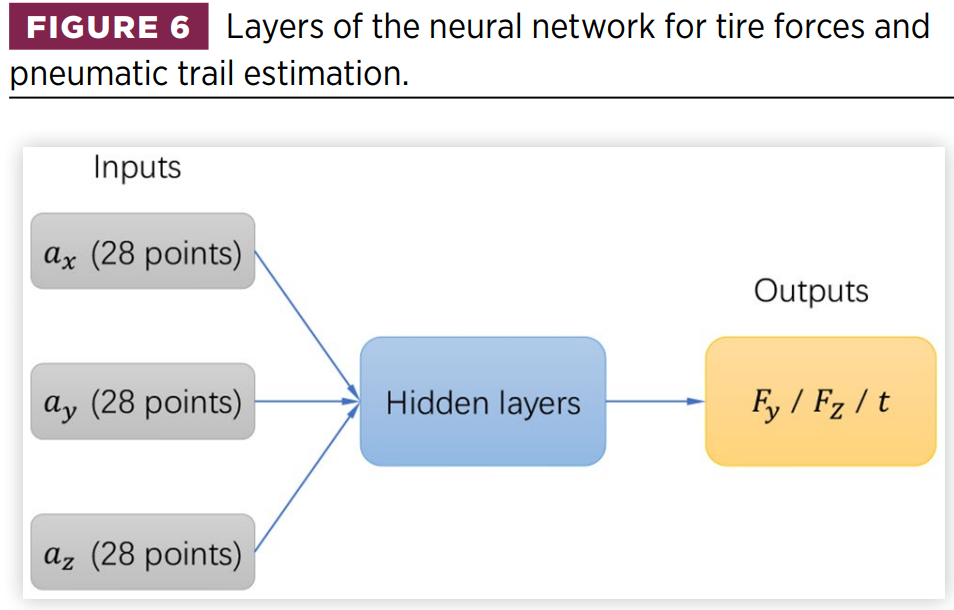
- 입력
- 세 방향의 선택된 가속도 지점 (84개 지점)
- 출력
- 측정된 타이어 힘과 공압트레일
- 세 개의 독립적인 신경망은 이 세 가지 변수를 예측하기 위해 훈련
- 전체 데이터셋은 각각 70%, 15%, 15%로 훈련, 검증, 테스트에 나누어짐
- 모델의 성능을 평가
- 정규화된 평균 제곱근 오차 (NRMSE)를 채택
-
- Xi : 변수의 측정값을 의미
- X̂ i : 예측값을 의미
- N : 샘플 수
- 슬립 각도의 전 범위에서 측정값과 예측값의 좋은 일치성이 관찰
Friction Coefficient Estimation
- 마찰 계수 추정 방법
- 횡력 힘과 수직 힘을 기본 정보로 사용하며, 공압 트레일을 타이어의 측면 흥분 수준을 나타내는 지표로 활용
The Mechanism of the Method
- 마찰 계수 추정
- 도전과제
- 낮은 자극 하에서의 마찰 계수 추정과 알 수 없는 마찰 도로에서의 자극 수준 결정
- 후자는 마찰 추정을 믿을지 여부에 중요한 역할
- 낮은 자극 하에서의 마찰 계수 추정과 알 수 없는 마찰 도로에서의 자극 수준 결정
- 도전과제
- 횡력 힘 대비 공압트레일의 장점
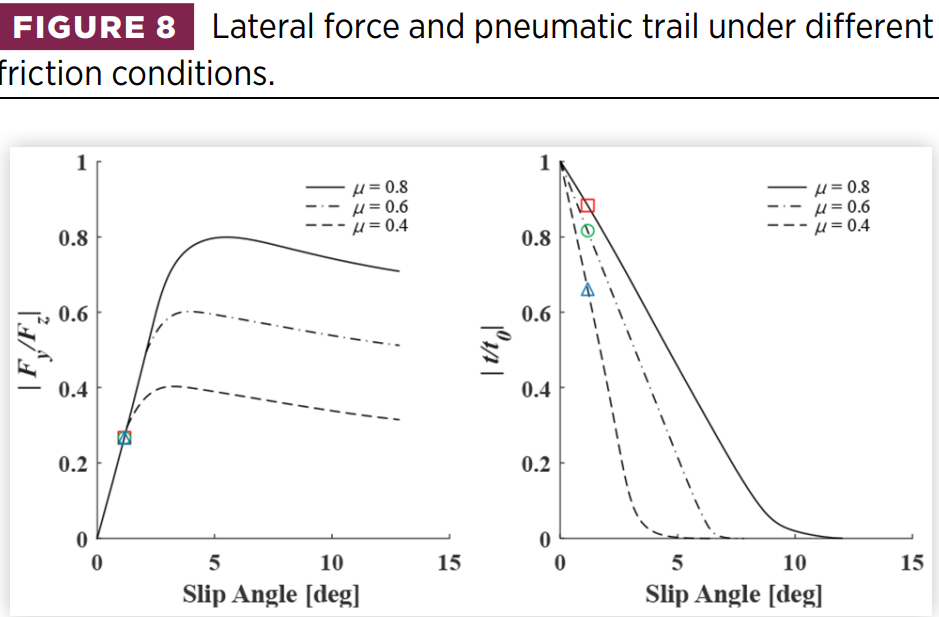
서로 다른 마찰 계수 하에서 표준화된 횡력 힘과 표준화된 공압 트레일을 보여주는 다이어그램 - 낮은 자극 조건에서 (슬립 각이 작을 때), 타이어는 선형 영역에서 작동, 생성된 횡력은 슬립 강도에 의해 결정
- 마찰 조건은 횡력에 영향을 미치지 않음
- 동일한 슬립 각과 다른 마찰 계수에 대한 표식들은 겹침
- 그러나 서로 다른 마찰 조건 하에서 공압 트레일은 측면 자극의 시작부터 발산
- 이는 낮은 자극 조건 하에서 마찰 계수를 구별할 수 있게 만들어 줌
- 또한, 마찰 추정 작업에서 공압 트레일의 추가 가치는 슬립 각에 거의 선형적으로 감소
- 어떤 초기 값을 가지고 시작하여 0으로 끝남
→ 이는 이론적으로 초기 공압 트레일의 정보를 알고 있다면, 하나의 사용 가능한 공압 트레일 지점만 얻어도 임의의 마찰 조건 하에서 타이어의 자극 수준을 결정할 수 있다는 것을 의미
- 어떤 초기 값을 가지고 시작하여 0으로 끝남
- 이 접근 방식은 비선형 회귀를 필요로하지 않으며, 일반적으로 차량에서 얻기 어려운 슬립 각을 입력으로 사용하지 않음
- 공압 트레일을 사용하여 자극 수준의 지표로 사용하고, 슬립 정도()를 정의
-
- : 초기 공압트레일
- 초기 공압 트레일은 수직 하중에 따라 결정되는 함수
- 타이어 테스트 데이터에 따라 설정
- tˆ : 추정된 공압 트레일
- : 초기 공압트레일
- 타이어가 슬립 각이 없이 회전하는 경우, tˆ은 에 가까워지고, 는 0이 됨
- 타이어가 횡력을 사용하지 않는 것을 의미
- 타이어가 완전한 슬립 상태로 가까워질 때, tˆ는 0이 되고, 는 1이 됨
- 이는 타이어가 모든 마찰력을 사용한다는 것을 의미
- 그런 다음, 횡력과 수직력의 정보를 통해 마찰 한계를 추정
- 전이 영역에서 공기 타일 및 횡력의 비선형성을 보상하기 위해, 실용적인 추정 방정식은 다음과 같이 수정
- λ는 조정되어야 할 매개 변수
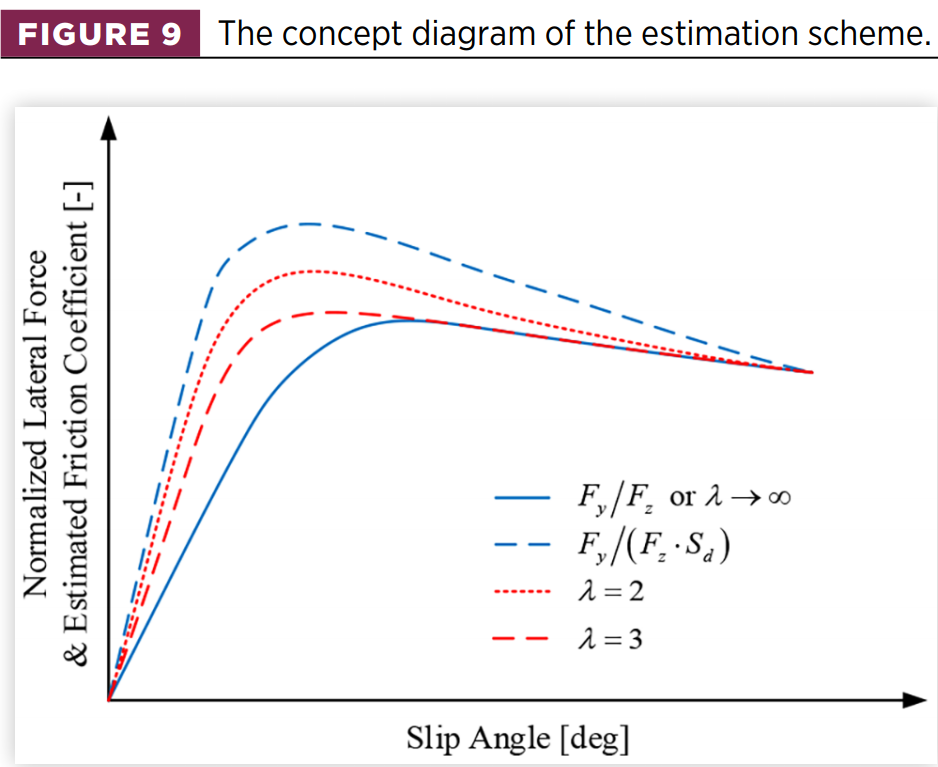
λ의 선택과 마찰 추정 방정식 간의 차이를 설명하기 위해 제공 - 실선의 파란색 선 : 수직 힘으로 정규화된 측면
- 파선의 파란색 선 : 정규화된 횡력 힘과 슬립 정도의 비율
- 수정이 없을 경우 마찰 계수가 과대 추정될 수 있다는 것을 알 수 있음
- 빨간색 선 : λ의 다른 값에 따른 추정된 마찰 계수
- λ가 무한대에 가까워질 때, 추정은 정규화된 횡력 힘에 수렴하며, 마찰 계수의 초기 감지가 이루어지지 않을 수 있음
- 만족스러운 결과를 얻기 위해서는 적절하게 조정된 λ가 필요합니다. 본 연구에서는 λ = 3으로 설정
-
The Friction Estimation Algorithm
- 마찰 추정을 위해 칼만 필터가 개발
- 는 마찰 추정을 채택할지 여부를 결정하는 데 사용
- 각 시간 단계에서 독립적인 마찰 추정이 이루어지므로, 결과에는 힘 및 공기 타일 추정의 불확실성으로 인한 잡음이 포함
- 이 효과를 제거하고 부드러운 마찰 추정 결과를 얻기 위해 1차원 칼만 필터가 채택됨
- 상태 벡터 X는 마찰 계수이고, 측정값 Z는 타이어 힘과 공기 타일로 추정된 마찰 계수
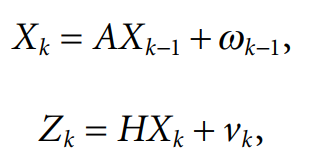
상태함수 - A = 1, H = 1
- ω는 공정 잡음(process noise)
- v는 측정 잡음(measurement noise)
- 공정 잡음과 측정 잡음은 정규 분포를 따른다고 가정
- 평균은 0이며, 각각의 공분산은 Q와 R
- 실제로는 추정 알고리즘에서 신호가 너무 낮아 신뢰할 수 있는 마찰 추정을 얻기 어려운 경우, 해당 시간 단계의 추정은 폐기되어야 함
- 따라서, 언제 마찰 추정을 채택할지 결정해야 함
- 슬립 정도( )가 이러한 필요를 충족함
- 칼만 필터의 실행 중에는, 활성화가 충분할 때, 즉, 가 임계값을 초과할 때, 칼만 필터는 측정 업데이트를 수행
- 가 임계값을 초과하지 않을 때, 칼만 필터는 이전 시간 단계의 추정을 유지
- 알고리즘을 초기화하기 위해, 기본 마찰 계수는 1로 설정
- 의 임계값은 조정 매개 변수
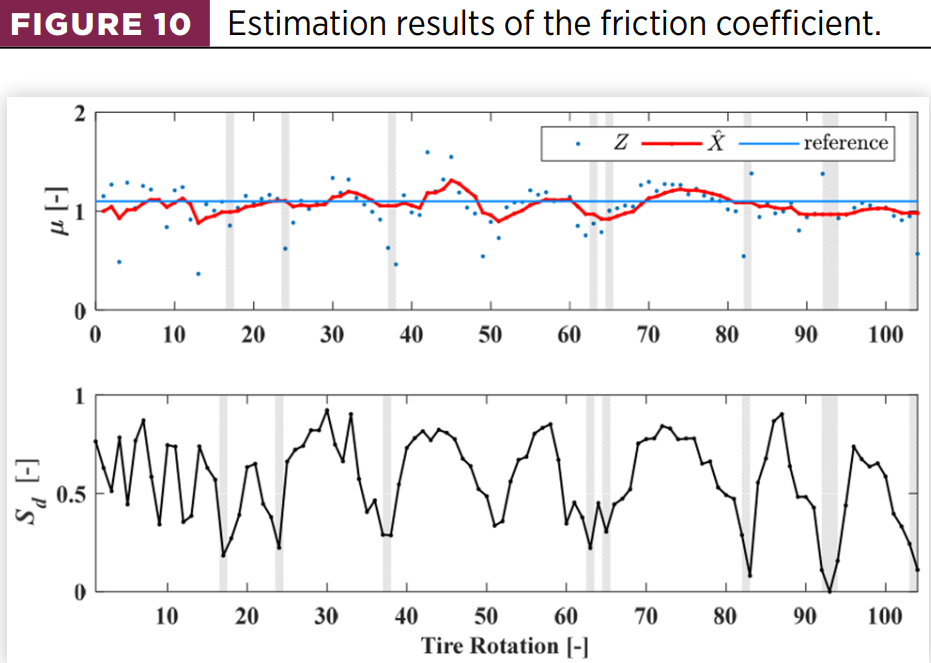
마찰 추정 결과1 (시간영역에서 추정된 마찰계수와 슬립 정도를 보여줌) - 파란색 선으로 표시된 참조 마찰 계수는 1.1
- 빨간색 선은 칼만 필터로 추정된 마찰 계수
- 파란색 점은 마찰 계수의 측정값
- 회색 영역은 충분한 활성화(슬립 정도가 작음)를 생성하지 못하여 신뢰할 수 있는 추정을 생성하지 못한 작동 지점
- 이러한 경우 이전 시간 단계의 추정이 유지
- 활성화가 충분하지 않은 지점들이 성공적으로 제외되고 결과는 안정적이며 참조 마찰 계수에 가까워짐을 확인
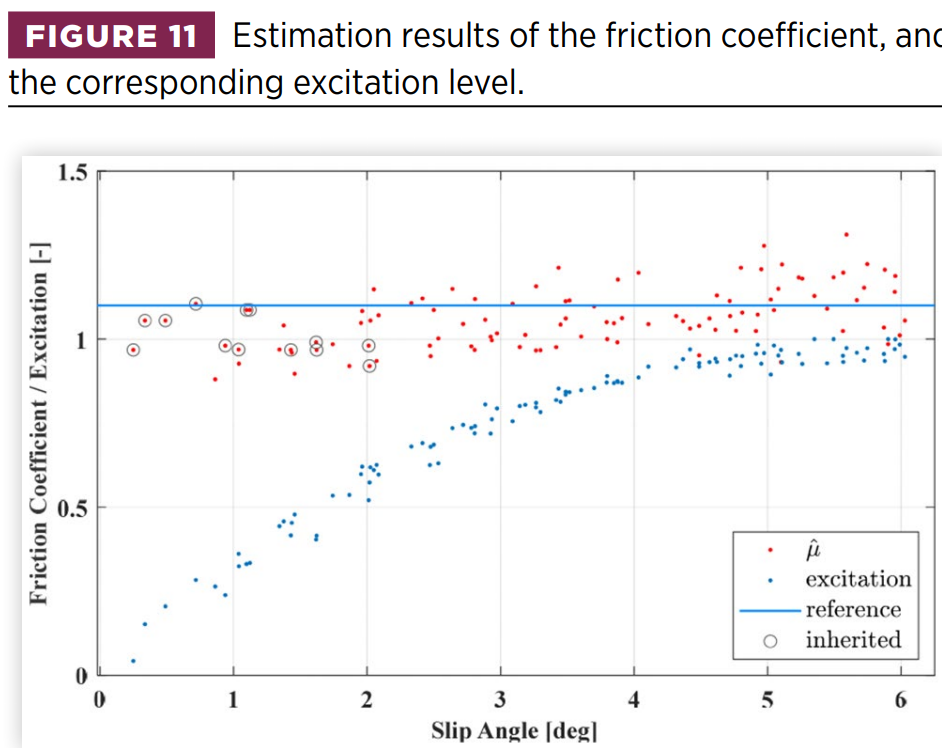
마찰 주정 결과 2 (마찰 추정 알고리즘에서 요구되는 활성화 수준의 분석) - 파란색 점은 각 작동 지점의 활성화 수준으로 로 계산
- 빨간색 점은 채택된 마찰 계수 추정값
- 회색 원이 있는 점들은 충분한 활성화가 없는 상태에서의 추정값
- 회색 원이 있는 점들은 이전 시간 단계의 추정값을 상속
- 활성화가 약 0.5를 초과하고 슬립 각도가 약 2도를 초과하는 경우 알고리즘은 신뢰할 수 있는 결과를 생성함을 확인할 수 있음
- 이는 가능한 최소한의 활성화로 마찰 한계를 예측하기 위한 목표에 한 걸음 더 나아간 것
실험적 검증 결과
- 논문에서는 지능형 타이어 시스템을 기반으로 코너링 조건에서 낮은 활성화를 요구하는 마찰 계수 추정 방법을 제안
- 지능형 타이어 시스템은 타이어 트레드의 내부 라이너 중심선에서 삼축 가속도를 측정하고, 훈련된 신경망을 통해 횡력, 수직 힘 및 공압 트레일 예측
- 마찰 추정 알고리즘
- 공압 트레일의 가치 있는 특성을 활용
- 측면 활성화의 초기부터 마찰 조건의 변화에 민감함
- 마찰 계수는 정규화된 측면 힘과 슬립 정도의 비선형 적응 비율로 추정
- 마찰 잠재력의 사용 지표인 슬립 정도가 제안
- 1차원 칼만 필터는 타이어 힘과 공압트레일의 불확실성으로 인한 마찰 추정의 변동성을 다루기 위해 채택
- 슬립 정도는 활성화가 알고리즘에 신뢰할 수 있는 추정을 제공하기에 충분한지, 그리고 마찰 계수의 측정 업데이트가 활성화되는지를 결정하는 데 사용
💡
결과는 제안된 마찰 추정 방법이 활성화 수준이 0.5보다 크고 슬립 각도가 2도보다 큰 낮은 활성화에서 신뢰할 수 있는 추정을 얻을 수 있음을 보여줌
→ 실험실 내에서의 실험 설정에 제한이 있어 타이어는 하나의 마찰 계수에 대해서만 테스트함
