
💡
지능형 타이어와 기계 학습 기법을 활용한 타이어 힘 추정에 초점. 타이어 내부 라이너에 설치된 삼축 가속도 센서가 장착된 지능형 타이어 시스템을 제시
타이어 모델
- 작동조건에 따라 순수 및 결합슬립모델로 분류
- 주로 타이어의 운동을 계산할때 사용하는 타이어 모델
- magic formula
- 평균 집적 LuGre
- UniTire
- Kamm circle
- Nicolas-Comstock
- Dugoff
→ 타이어 힘을 어느정도 예측할 수 있지만, 매개변수는 실험적으로 조정되어야 함
→ 실제 타이어의 노화 및 복잡한 주행 조건기 매개변수에 영향을 미치므로 실제 응용이 어려움
- 주로 타이어의 운동을 계산할때 사용하는 타이어 모델
타이어 힘 연구 방법
- 타이어 힘을 추정하는 4가지 방법
- 선형,
- RLS
- 슬라이딩모드
- 비선형
- 미지의 입력 옵저버
- 칼만기반 기술
- 수직 힘 추정을 위해 일반적으로 종방향 및 횡방향 하중 이동과 각 타이어의 정적 하중을 사용
- 종방향 및 횡방향 하중 이동과의 결합을 통해 타이어 수직 힘을 모델링하고, 칼만 필터를 기반으로 한 측력 이동 및 수직 힘을 추정하는 알고리즘을 제안
- M. Doumiati, A. Victorino, A. Charara, and D. Lechner, “Lateral load transfer and normal forces estimation for vehicle safety: Experimental test,” Vehicle Syst. Dyn., vol. 47, no. 12, pp. 1511–1533, Dec. 2009.
- M. Doumiati, A. Victorino, D. Lechner, G. Baffet, and A. Charara, “Observers for vehicle tyre/road forces estimation: Experimental validation,” Vehicle Syst. Dyn., vol. 48, no. 11, pp. 1345–1378, Nov. 2010.
- 정적 하중에 종방향 및 횡방향 하중 이동을 추가하여 타이어 수직 힘을 연구
- W. Cho, J. Yoon, S. Yim, B. Koo, and K. Yi, “Estimation of tire forces for application to vehicle stability control,” IEEE Trans. Veh. Technol., vol. 59, no. 2, pp. 638–649, Feb. 2010.
- 지연 상호 연결된 카스케이드 옵저버 구조와 확장된 칼만 필터(EKF) 및 언센티드 칼만 필터(UKF)를 사용하여 수직 포함 타이어 힘을 찾기 위해 사용
- 지연 상호 연결의 구현은 카스케이드 추정기의 상호 종속성과 관련된 도전에 대응
- R. A. Cordeiro, A. C. Victorino, J. R. Azinheira, P. A. V. Ferreira, E. C. de Paiva, and S. S. Bueno, “Estimation of vertical, lateral, and longitudinal tire forces in four-wheel vehicles using a delayed interconnected cascade-observer structure,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 2, pp. 561–571, Apr. 2019.
- 종방향 및 횡방향 하중 이동과의 결합을 통해 타이어 수직 힘을 모델링하고, 칼만 필터를 기반으로 한 측력 이동 및 수직 힘을 추정하는 알고리즘을 제안
- 종방향 힘 추정
- 차량의 성능 특성을 결정하는 데 매우 중요
- 기법
- EKF(Extended Kalman Filter) 기법
- 상태 추정으로 타이어의 종방향 힘을 계산하기 위해 채택되었으며, 이를 통해 복잡한 타이어 모델 매개 변수를 피할 수 있음.
- M. A. Wilkin, W. J. Manning, D. A. Crolla, and M. C. Levesley, “Use of an extended Kalman filter as a robust tyre force estimator,” Ve h i c l e Syst. Dyn., vol. 44, no. sup1, pp. 50–59, Jan. 2006.
- 랜덤 워킹 모델
- W. Cho, J. Yoon, S. Yim, B. Koo, and K. Yi, “Estimation of tire forces for application to vehicle stability control,” IEEE Trans. Veh. Technol., vol. 59, no. 2, pp. 638–649, Feb. 2010.
- R. Rajamani, G. Phanomchoeng, D. Piyabongkarn, and J. Y. Lew, “Algorithms for real-time estimation of individual wheel tire-road friction coefficients,” IEEE/ASME Trans. Mechatronics, vol. 17, no. 6, pp. 1183–1195, Dec. 2012.
- 타이어의 종방향 힘을 추정
- 랜덤 워킹 모델을 사용하여 타이어의 종방향 힘을 추정하는 경우, 모델의 동적 정보가 상태 보정 과정에서 완전히 활용되지 않아 문제가 발생
- R. A. Cordeiro, A. C. Victorino, J. R. Azinheira, P. A. V. Ferreira, E. C. de Paiva, and S. S. Bueno, “Estimation of vertical, lateral, and longitudinal tire forces in four-wheel vehicles using a delayed interconnected cascade-observer structure,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 2, pp. 561–571, Apr. 2019.
- 슬라이딩 모드 옵저버
- 타이어의 종방향 힘을 식별하는 데 사용
- EKF(Extended Kalman Filter) 기법
- 횡방향 힘 추정
- 관측 가능성 조건 때문에 다른 두 힘에 비해 가장 도전적인 작업
- 랜덤 워크 칼만 필터
- M. Doumiati, A. Victorino, D. Lechner, G. Baffet, and A. Charara, “Observers for vehicle tyre/road forces estimation: Experimental validation,” Vehicle Syst. Dyn., vol. 48, no. 11, pp. 1345–1378, Nov. 2010.
- 타이어의 횡방향 힘과 측면 슬립 각도를 식별하기 위해 EKF와 UKF 옵저버를 사용
- M. Doumiati, A. Correa Victorino, A. Charara, and D. Lechner, “Onboard real-time estimation of vehicle lateral Tire–Road forces and sideslip angle,” IEEE/ASME Trans. Mechatronics, vol. 16, no. 4, pp. 601–614, Aug. 2011.
- 비선형 차량 역학 모델을 기반으로 상호 작용하는 다중 모델 언센티드 칼만 필터 (IMM-UKF) 및 상호 작용하는 다중 모델 확장 칼만 필터 (IMM-EKF)를 사용
- X. Jin and G. Yin, “Estimation of lateral tire–road forces and sideslip angle for electric vehicles using interacting multiple model filter approach,” J. Franklin Inst., vol. 352, no. 2, pp. 686–707, Feb. 2015.
- 4자유도 차량 모델을 사용하여 각 바퀴의 횡방향 타이어 힘을 추정
- 횡방향 힘의 시간 미분이 롤 각속도에 비례한다고 가정
- K. Huh and J. Kim, “Active steering control based on the estimated tire forces,” J. Dyn. Syst., Meas., Control, vol. 123, no. 3, pp. 505–511, Sep. 2001.
→ 타이어 힘을 찾기 위해 수행된 몇몇 추정 작업들은 타이어와 차량 모델에 크게 의존
→ 여전히 차량이 격렬한 조작을 할 때 충분하지 않고 신뢰성이 부족
→ 이러한 간접적인 방법은 제어 절차에 추가적인 불확실성을 도입
→ 적분 오차나 시간 지연과 같은 부정확성
→ 비상 상황에서 운전자 및 운전자 지원 시스템에 치명적
- 차량 제어의 관점에서 지능형 타이어의 응용
- 지능형 타이어 기술은 타이어 내부에 설치된 센서를 사용하여 타이어 변형이나 응력을 측정하여 더 정확한 타이어 변수를 제공할 수 있다는 것이 입증
- 지능형 타이어 기술과 관련된 제어 알고리즘은 옵저버의 불확실성이 사라지기 때문에 더 효과적일 수 있다고 기대
- H. Lee and S. Taheri, “Intelligent tires? A review of tire characterization literature,” IEEE Intell. Transport. Syst. Mag., vol. 9, no. 2, pp. 114–135, Apr. 2017.
- 타이어 힘과 모멘트를 베어링 변형과 관련시키기 위해 응력 게이지를 사용한 로드-감지 허브 베어링(Load-Sensing Hub Bearings, LSB) 장치가 개발
- J. den Engelse, “Estimation of the lateral force, acting at the tire contact patch of a vehicle wheel, using a hub bearing unit instrumented with strain gauges and eddy-current sensors,” M.S. thesis, Delft Univ. Technology, Delft, The Netherlands, 2013.
- 지능형 타이어 개발을 위해 여러 종류의 감지 시스템이 설계되어 타이어의 동적 매개변수를 직접 측정하는 데 사용
- Y. Hu, C. Xu, Y. Zhang, L. Lin, R. L. Snyder, and Z. L. Wang, “A nano generator for energy harvesting from a rotating tire and its application as a self-powered Pressure/Speed sensor,” Adv. Mater., vol. 23, no. 35, pp. 4068–4071, Sep. 2011.
- Y.-J. Wang, C.-D. Chen, C.-C. Lin, and J.-H. Yu, “A nonlinear suspended energy harvester for a tire pressure monitoring system,” Micromachines, vol. 6, no. 3, pp. 312–327, Feb. 2015.
- P. Li, S. Gao, and H. Cai, “Modeling and analysis of hybrid piezoelectric and electromagnetic energy harvesting from random vibrations,” Microsyst. Technol., vol. 21, no. 2, pp. 401–414, Feb. 2015.
- 타이어의 직접 측정을 통해 추출된 데이터는 일반적으로 추정 기법이나 타이어 모델과 융합되어 타이어 힘의 더 나은 예측을 제공
- 피드포워드 역전파 알고리즘을 사용하여 타이어 모델링에 대한 신경망의 타협성을 조사
- H. Kim and P. L. Ro, “A tire side force model by artificial neural network,” SAE Tech. Paper 951051, 1995.
- 재귀적 레이지 학습 방법을 사용하여 복잡하고 다양한 타이어 환경에서의 장점
- M. J. L. Boada, B. L. Boada, D. Garcia-Pozuelo, and V. Diaz, “Neural empirical tyre model based on recursive lazy learning under combined longitudinal and lateral slip conditions,” Int. J. Automot. Technol., vol. 12, no. 6, pp. 821–829, Dec. 2011.
- 의사 결정 트리 기반 모델을 훈련시켜 전문 운전자의 주관적 평가 점수와 차량 동역학 목적 측정치 사이의 관계를 구축
- C. Cramer and B. Wies, “Application of objective vehicle dynamics methods in the tire development process,” in Proc. 8th Int. Munich Chassis Symp., 2017, pp. 735–754.
- 컨볼루션 신경망 (CNN)을 적용하여 전면 카메라 이미지를 사용하여 도로 표면 조건을 분류하기 위해 지역별 특징을 학습
- S. Roychowdhury, M. Zhao, A. Wallin, N. Ohlsson, and M. Jonasson, “Machine learning models for road surface and friction estimation using front-camera images,” in Proc. Int. Joint Conf. Neural Netw. (IJCNN), Jul. 2018, pp. 1–8.
- SHRP2 자연주행 연구 비디오 데이터를 사용하여 실시간으로 눈 감지 시스템을 개발하기 위해 두 가지 텍스처 기반 이미지 특징과 서포트 벡터 머신 (SVM), k-최근접 이웃 (K-NN) 및 랜덤 포레스트 (RF)와 같은 세 가지 분류 알고리즘을 사용하여 이미지 그룹을 분류
- M. N. Khan and M. M. Ahmed, “Snow detection using in-vehicle video camera with texture-based image features utilizing K-Nearest neighbor, support vector machine, and random forest,” Transp. Res. Rec., J. Transp. Res. Board, vol. 2673, no. 8, pp. 221–232, Aug. 2019.
- 사이드 슬립 각도 추정을 위해 게이트된 재귀 유닛을 가진 순환 신경망 (RNN)의 사용을 조사
- 추정의 성능과 견고성을 더욱 개선하기 위해 단순화된 차량 모델이 통합
- 건조, 젖은 및 눈이 내린 도로 표면 조건에 걸친 약 600만 개의 데이터 포인트가 사용되었으며, 결과는 모든 상황에서 높은 추정 품질
- T. Graber, S. Lupberger, M. Unterreiner, and D. Schramm, “A hybrid approach to side-slip angle estimation with recurrent neural networks and kinematic vehicle models,” IEEE Trans. Intell. Vehicles, vol. 4, no. 1, pp. 39–47, Mar. 2019.
- Random Forest 알고리즘은 여러 의사 결정 트리의 결정을 사용하고 병합하여 결과를 도출
- 기본적으로 모든 의사 결정 트리의 평균을 계산하여 단일 트리의 가능한 오류를 보상하며 실제 값으로부터 멀리 떨어진 결과를 덜 만들어냅니다
- 많은 실제 응용에서 Random Forest는 매우 강력한 학습 접근법으로 입증
- T. Kam Ho, “The random subspace method for constructing decision forests,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 20, no. 8, pp. 832–844, Aug. 1998.
- 회귀 문제에 사용될 때 Random Forest는 학습에 사용된 대상 변수의 값 범위를 벗어날 수 없는 제한이 있음
- P. Ellis. Extrapolation is Tough for Trees! [Online]. Available: http://freerangestats.info/blog/2016/12/10/extrapolation
- RNN(Recurrent Neural Network)은 시간적 의존성을 포착할 수 있는 신경망의 한 종류로, 순차 데이터를 처리하고 예측하는 데 적합
- 자연 언어 처리 및 음성 인식과 같은 응용에 잘 맞는 기술
- H. Hewamalage, C. Bergmeir, and K. Bandara, “Recurrent neural networks for time series forecasting: Current status and future directions,” Int. J. Forecasting, vol. 37, no. 1, pp. 388–427, 2021.
실험 구성
- Rprop 알고리즘을 사용한 신경망이 타이어 힘 추정에 있어 가장 효과적인 방법으로 채택
- R에서 인공 신경망의 기초로 사용되며 수렴 속도, 정확성 및 학습 매개변수와 속도의 견고성 측면에서 가장 우수한 방법 중 하나
- 부호 기반 기법을 사용하여 가중치를 업데이트하여 변화하는 가중치에 미분 값의 크기가 부정적인 영향을 미치는 것을 방지
- 잡음이 있는 오차를 효과적으로 처리할 수 있기 때문에 하드웨어 구현에 매우 적합
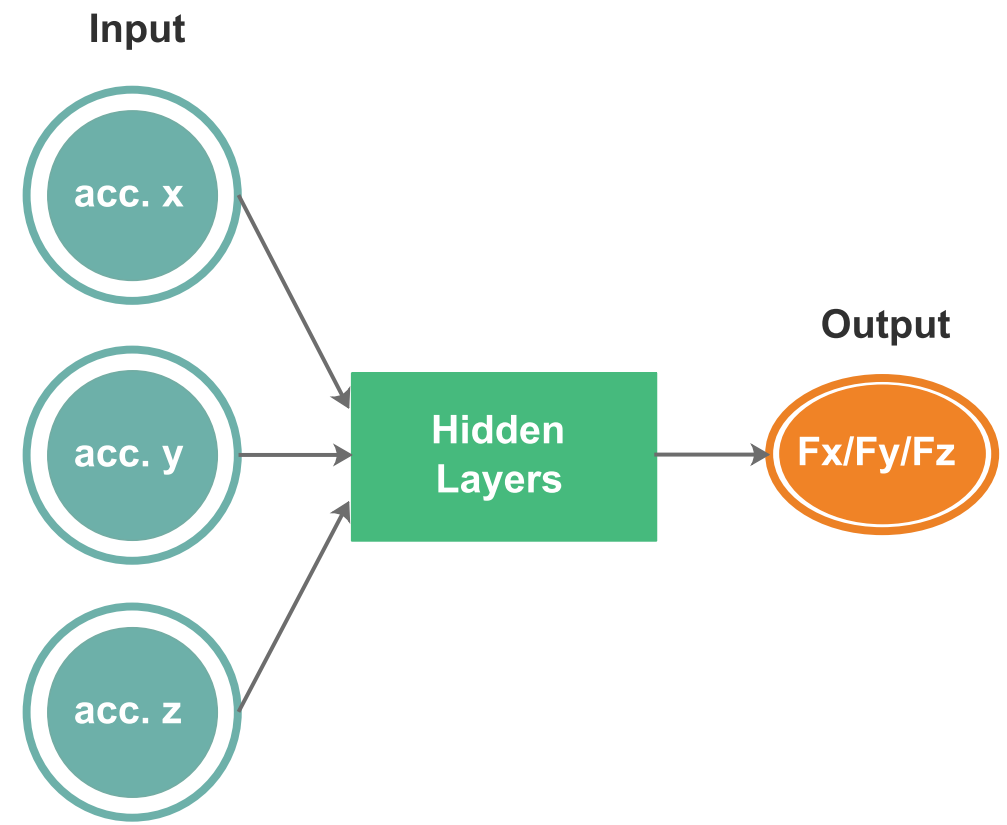
- 로지스틱 활성화 함수와 평균 제곱 오차(MSE) 성능 지표를 사용한 Rprop 알고리즘을 우리의 연구에서 채택
- 3개의 은닉층 (10-5-1)을 고려
- Fx 및 Fz 추정을 위해 종축 및 수직 가속도가 함께 입력
- Fy 추정을 위해 세 가지 방향의 가속도 신호 사용
→ NRMS 오차는 0.81%로, 기계 학습 기술이 높은 정확도로 타이어 수직 하중 추정을 위한 유망한 잠재력을 가지고 있다는 것을 보여줌
- 다른 모델 사용 결과
- Random Forest
- 의사 결정 트리의 개수를 증가시키면 정확도가 향상되지만 시스템의 훈련 및 테스트에 필요한 계산 시간이 증가
- 타이어 힘 추정을 위해 각 데이터 세트에 대해 대부분의 최소 오류율은 100 또는 150의 의사 결정 트리를 사용하여 달성
- 수렴 속도가 빠르지만, 몇 가지 큰 오류가 존재
- Random Forest가 회귀 문제에 적용될 때 외삽의 제한 때문
- Random Forest의 예측 범위는 훈련 데이터의 최소값과 최대값으로 제한
- 훈련 및 예측 입력이 범위나 분포에서 다른 경우에 문제가 됨
- 큰 슬립 앵글과 같은 극한 주행 조건에서는 가속도 데이터의 심한 잡음으로 인해 Random Forest가 원래 훈련 데이터의 범위를 벗어난 테스트 데이터에 대해 잘 작동하지 않음
- RNN 모델
- sgd 옵티마이저와 평균 제곱 오차(MSE)를 사용
- 10-5-1의 세 개의 은닉층이 사용
- 배치 크기, 에포크 수 및 학습률에 대한 하이퍼파라미터 구성은 각각 50, 10000 및 0.001로 설정
- 타이어 힘 추정에 좋은 성능
- 때로는 Rprop 알고리즘을 기반으로 하는 NN보다 더 나은 결과
- RNN 알고리즘은 더 복잡하며, 훈련 시간과 더 많은 과거 정보를 입력 변수로 필요
- (여기서는 10배의 데이터를 사용)
- 차량 안전 제어를 위해서는 네트워크를 가능한 한 간단하게 유지하는 것이 중요
- 타이어 힘 측정/추정을 위한 직접적인 방법에서는 시간적 종속성을 피하려고 노력
- Rprop 알고리즘을 기반 신경망
- 타이어 힘 추정에 가장 효과적인 접근 방식으로 간주
- 정확성, 수렴 속도 및 복잡한 주행 조건 처리 능력이 우수
- 실시간 응용 및 차량 안전 제어에 적합
- Random Forest